Futura Automation, LLC (www.futura-automation.com) provides a range of robotic, automation and motion-controlled solutions. This week’s newsletter from Futura Automation explains the benefits of Cartesian robots, especially those supplied by Macron Dynamics, Inc., as compared to the other major industrial robot topologies: #Articulated, Delta and SCARA. This article will explain the four primary benefits of Cartesians:
- Flexibility in Design
- Substantially Longer Reach (Travel)
- Greater Payload
- Cost Savings
Most people know the six-axis (articulated) robot arm shown frequently in media on automotive welding lines or for case packing and palletizing. #Delta robots are popular for high volume pick and place between two conveyor belts in food packaging, primarily. #SCARA or 4-axis arms are another common form factor for industrial robots. SCARA is best at small part picking and placing in electronics, medical packaging and small consumer products. Standard robot topologies like Articulated and SCARA have well defined work envelopes dictated by their manufacturers and the mechanics of the arm. What if an unusual motion is required or one that is very tall or very long? For that we can offer Cartesian robots. Cartesians, sometimes called gantry robots, are a very common and simple robotic topology. Gantry cranes, of course, predate automated Cartesian robots by centuries. But the form factor is quite similar. The difference is the automation employed by gantry robots so that movements can be pre-programmed and in some cases, assisted by machine vision.
What Is a Cartesian Robot?
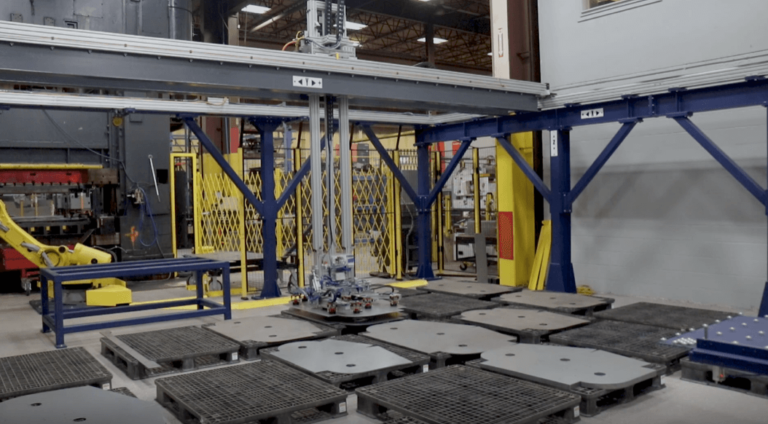
3D printers utilize the Cartesian or linear robot topology, whether a desktop model or one large enough to print a house using concrete. Another common example is a pick and place machine used in electronic circuit board manufacturing, often called a “chip shooter”. Smaller form factor Cartesian robots are often built over a table or conveyor system. They will typically have 3 axes of motion. They can move up/down, forwards/backwards, and left/right. Cartesians, like all robots, have an end effector that performs the assigned task. Cartesians that perform the most precise tasks, normally in the semiconductor and optical industries, have repeatability of less than one micron over a reach or span of less than 30 centimeters.
End Effectors for Cartesian robots can include:
- Vacuum Gripper
- Mechanical Gripper
- Printer head
- Router head
- Waterjet
- Cutting Laser
- Mixing or stirring tools
- Machine Vision
Which Industries Use Cartesian Robots?
Since they have a wide array of applications, Cartesian robots are found in many industries. Manufacturers in the following industries commonly take advantage of this technology:
- Aerospace – Machining and Finishing
- Agriculture – Vertical Farming
- Packaging – Case Packing & Palletizing
- Machine Tending (CNC or Plastics)
- Electronics, Optical and Semiconductors
- Medical Device Assembly and Pharma Dispensing
- Multi-media, Stage Equipment and Advertising
- Food and Beverage Handling
These are just a few of the many examples. Cartesian technology has been around for a long time. Because of this, there are many tried and true applications for these robots. They are also simple to understand and reprogram for operators. This makes them user-friendly for those new to automation. These manufacturers often have the types of applications in which Cartesian robots can excel.
Typical Applications of Cartesian Robots
Cartesian robots are the correct solution in many applications and for others, a linear robot would be a poor choice. The key limitation for a Cartesian is the limited range of motion, especially the waist axis or Joint 1 (J1) and the wrist action or J5 and the rotary J6 on Articulated robots. Six-axis robots can bend and turn into all kinds of positions. If material must be handled or rotated on an angle, either picking or placing, welding, painting or dispensing, then articulated arms make more sense. Cartesian robots are much more rigid in their motion with no rotary motion, except with a possible rotary actuator on the end effector. This may seem like a limitation, and it can be. But it also is an advantage in applications designed in a planar fashion, like placing, sorting or stacking product on a platform or conveyor. This planar quality of linear robots carries advantages that allow them to perform better than other robot types for certain applications. Here are a few examples:
- CNC machine tending
- 3D printing
- Metal plasma/laser cutting
- Screwdriving
- Dispensing
- Wood handling and routing
- PCB assembly and testing
- Pick and place or Sorting
- Logistics – AS/RS for warehousing
- Vertical farming
- Inspection
There are a few reasons why cartesian robots can excel in these applications. First, these applications are commonly performed in one plane or dimension. For example, a laser Cartesian robot is tasked with cutting a shape out of a sheet of metal. The sheet of metal is laid flat on the cutting surface. The robot performs its commanded moves to cut the shape out of the piece. This motion doesn’t require the robot to twist at special angles or rotate to the side of the piece. It is all up/down, forwards/backwards, and left/right motion. Some cartesian robots will have an additional rotary axis at the end effector. If significant flexibility and range of motion is required, then another robot type might be best.
Flexibility in Design
Cartesian robots are the most scalable robot platform available. This scalability is in both their potential physical size and ultimate strength. Cartesian robots can be as small as the palm of your hand and as large as a warehouse. Very small Cartesians are often called “multi-axis stages” and are used for micron accuracy photolithography, dispensing, placement or laser cutting in electronics. There are also large Cartesian robots today that are 50 meters (164 feet) long or more. A common “large Cartesian” application is Robot Transfer Units, or single “7th Axis” as they are commonly known. Articulated robots can also be mounted on an XY or XZ Cartesian to cover large areas, like might be used for grinding weldments or finishing a ship. Metal reinforced belt actuators allow Macron Dynamics to make these systems incredibly long and suitable for up to 2200 lb. (1000kg) payloads. These mechanics in addition to large ratio gearboxes and motors that don’t have to fit inside a slim robot body-casing means cartesian robots can handle the biggest and heaviest of tasks with ease.
Scalability in Reach (Length)
Futura Automation’s customers reap the benefits of the flexibility and scalability of customized Cartesian robots. It is possible to build a Cartesian that is as long as the structural span of a building. Futura’s partner, Macron Dynamics, will provide fiberglass pultrusion beam reinforcement for the horizontal span. It is also possible to reinforce the linear actuator with steel I-beams for longer spans and heavier loads. A 200 ft (60m) horizontal X or Y axis is a possibility as is a 60 ft (20m) tall Z axis. A Cartesian can also incorporate a theta axis drive for rotation on the end of the Z or vertical axis or provide a wrist action.
Wide Range of Payloads
Gantries using steel reinforced belts and when reinforced by fiberglass pultrusion beams or steel I-beams, can handle thousands of pound loads rivaling the strongest (and very expensive) articulated robot arms. It is possible to apply an integrated mechanical brake to a servo gearmotor to hold a load in a vertical axis, even with power removed. Macron Dynamics also offers its CLAWS system as a safety device to protect against uncontrolled vertical loads.
Cost of a Cartesian Robot
We have learned that Cartesian robots are highly scalable. This means their costs are highly scalable as well. In 2023 the cost of a complete Cartesian robot system, including servo drives and controls will vary from $20,000 for a small system up to $200,000 or more for a very large system. But all else equal, the reach and the payload, using a Cartesian robot for a project, will be less expensive than using another comparable industrial robot form factor, such as six-axis for the same project, for the same reach and payload. The primary reason for this is the use of standardized extrusions and off-the-shelf servos rather than cast mechanical arms with custom servos, cycloidal gearing and custom bearings as are required for articulated arms. The primary cost variables for Cartesian robot projects are:
- Size and speed of the project (actuator lengths and payload capacities) and if any reinforcing super-structure is required
- Complexity of the application (what types of specialized grippers or additional theta axes are required)
- Type of control, communications and human-machine (HMI) required for operation
- Level of precision required, which might even require a zero-backlash screw drive hybrid in one of more of the axes
- Whether or not safety fencing or sensors are required to provide protection
Summary: When Do Cartesian Robots Win over Articulated, Delta or SCARA Robots?
Now you know a bit about Cartesian robots and their applications. So, when are they right for you and your project? We can help you answer these questions. But in short, here are the main considerations:
- Are you looking for cost reductions or throughput increases?
- Is the payload or reach a big challenge for an articulated or SCARA arm?
- What precision / accuracy is required for the application?
- What is the speed profile versus the load, i.e. what are the inertia and drive torque requirements?
As there is a clean slate to design a Cartesian robot it is important to correctly match the inertia when selecting the motor and gearbox. Futura Automation will help with inertia matching when we provide our design guidance for our client projects. Here is a document from industry association “A3” which thoroughly describes the importance of impedance matching. A video guide for inertia matching is also provided: https://www.automate.org/industry-insights/understanding-the-mysteries-of-inertia-mismatch
How Futura Automation can Support your Project
Contact us at: sales@futura-automation.com
Recent Comments